Los motores BLDC también llamados brushless son motores que funcionan de forma similar a un motor trifásico, aunque su tensión de alimentación procede de un inversor electrónico alimentado por corriente continua desde una batería.
La tensión que recibe el motor es trifásica y puede tener forma cuadrada o senoidal dependiendo del inversor que lo alimenta, que en adelante llamaremos “controladora”
La controladora recibe tensión continua y ofrece tensión alterna de frecuencia variable, cuya onda está construida a base de impulsos PWM con valores de tensión y frecuencia tales que pueden producir a la salida el valor de tensión trifásica deseada para alimentar al motor.
Si entendemos que el motor BLDC se comporta como un motor síncrono, entonces el momento de aplicación de la tensión debe coincidir con una posición del rotor determinada, que la definen las masas polares cuando pasan frente a los sensores hall. En esos momentos, los sensores envían una señal eléctrica a la controladora, que administra frecuencia y fase de la tensión al motor.
En resumen, hay algunas características esenciales de estos motores que deben tenerse en cuenta:
-Los motores BLDC son motores trifásicos con modo de funcionamiento síncrono.
-Motor BLDC y controladora están sincronizados a través de la línea trifásica de alimentación y a través de las líneas de feedback de los sensores hall.
-Los sensores hall se alimentan de tensión continua a 5Vcc procedente de la controladora, y envían a la controladora el impulso de tensión que corresponde a la posición del rotor.
-Las tarjetas controladoras son electrónicas, con control a microprocesador, y etapa de potencia de salida a transistores.
-El motor BLDC se alimenta de tensión alterna trifásica, procedente de la controladora que es alimentada por tensión continua procedente de una batería. Por lo tanto la controladora es un inversor variador de frecuencia específico para motor BLDC.
En lo sucesivo vamos a abrir algunos modelos usuales de motor BLDC para analizar en su interior a los elementos que aquí hemos mencionado, como los sensores, imanes y bobinado.
Abriremos para analizar, dos tipos de motor: Un motor de 5KW tipo axial, y dos motores de 1,5kw BLDC estandard.
Este motor BLCD tiene 5KW de potencia disponible cuando se alimenta desde una controladora alimentada a 48Vcc.
Tiene un eje de 22,2mm de diámetro con chavetero.
Gira a 4500 rpm como máximo antes de que su funcionamiento sea inestable.
Se usa ampliamente en motos eléctricas, especialmente en motos de cross y scooters eléctricos. También se usa en microcoches urbanos eléctricos de 2 plazas, y una de sus aplicaciones más interesantes es como motor de kart eléctrico de competición. En ese caso puede utilizarse la misma versión de motor con refrigeración líquida, debido a la alta exigencia de potencia y para mantener limitada la temperatura del motor, y sobre todo la temperatura de las masas magnéticas de neodimio que se pueden deteriorar. También sufren los pegamentos y resinas interiores y los sensores hall.
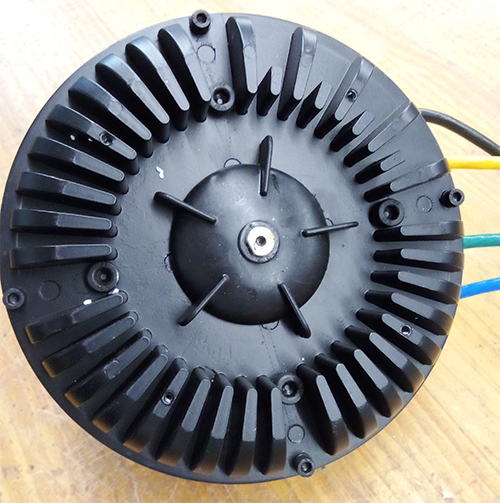
En nuestro caso no exigimos un uso tan intensivo a este motor, y disponemos de su versión con ventilador unido al eje. Vamos a abrir este motor para analizar su interior.
Vemos que la carcasa de la tapa dispone de aletas disipadoras de calor en dirección de la salida del aire que el ventilador mueve.
Es un sistema de refrigeración mecánica. Su eficiencia depende de la velocidad de giro del ventilador unido al eje, del estado del propio ventilador, y de la limpieza del motor o ausencia de polvo entre las aletas.
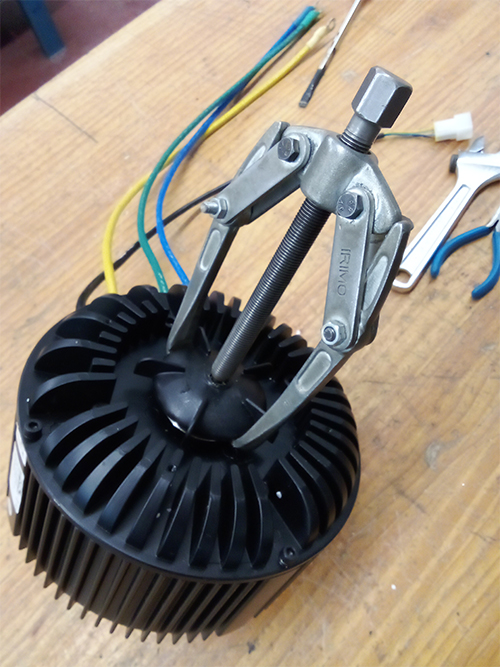
Para retirar este ventilador hay que retirar primero la arandela de anillo circlip exterior con ayuda de un alicate de abrir circlips.
Después veremos si el ventilador puede salir sin herramienta, y en caso contrario usaremos un extractor de rodamientos.
El ventilador no ofrece mucha resistencia al retirarlo del eje, aunque ha sido necesario el uso de un extractor de dos patas.
El ventilador es de plástico, y si se resiste a salir entonces debemos tener cuidado de no dañarlo porque el extractor tira con fuerza de él.
En este caso no es necesario colocar el motor en ningún soporte, aunque siempre conviene mantenerlo sujeto mientras se manipula.
El motor tiene la salida de los cables por un lateral de la carcasa, y no existe caja de bornes, sino tres cables de fase y una manguera con los cables de los sensores Hall.
Se han retirado los tornillos allen de lata tapa. 4tornillos que sujetan la tapa a la carcasa y 4 tornillos que unen la tapa al disco que aparece en la imagen.
Los núcleos de las bobinas del motor están unidos por ese disco que además debe ser refrigerado por la tapa conduciendo el calor a través de grasa termoconductora.
Hay espacio suficiente entre las bobinas y la carcasa, los cables entran por ese espacio. Las fases como siempre son verde, azul y amarilla. La manguera negra lleva sensores hall.
Vamos a retirar también la tapa del lado del acoplamiento.
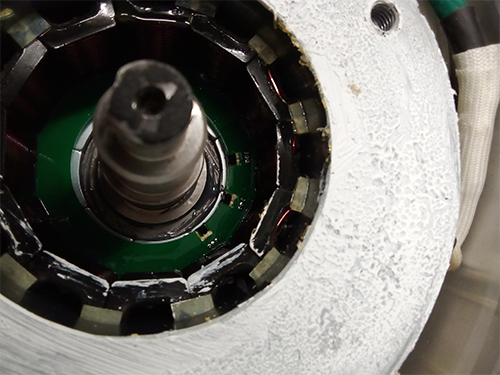
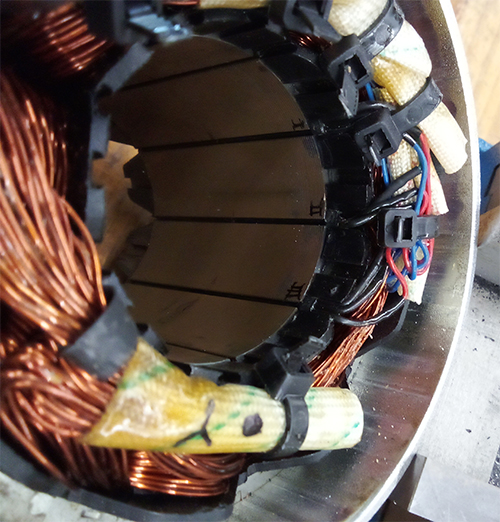
Aquí vemos el disco del polo común superior lleno de grasa termoconductora.
Más abajo, se reúnen los núcleos de dos bobinas adyacentes en un yugo que se enfrenta a un iman de neodimio del rotor.
En el fondo de la imagen se ve un disco de fibra de vidrio en verde, que contiene tres sensores hall soldados.
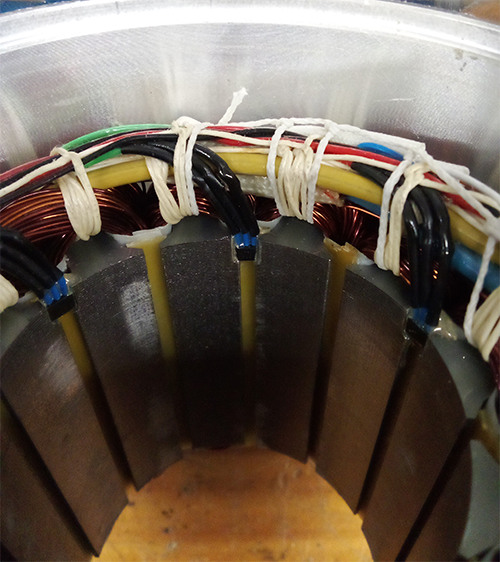
Al sacar la carcasa del estator, vemos las bobinas individuales al descubierto. Los terminales de cada bobina son dos y están aislados mediante unos tubos blancos.
Los cables de las fases llevan puestas sus protecciones pasa-tapa.
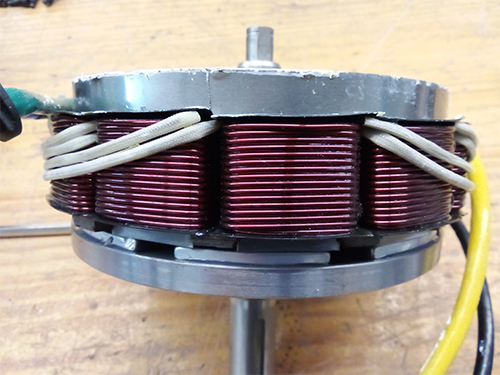
Se observa que el disco polar superior tiene un espesor considerable para ofrecer baja reluctancia magnética, teniendo en cuenta la alta inducción ala que se le somete, debido a las altas intensidades de corriente del motor.
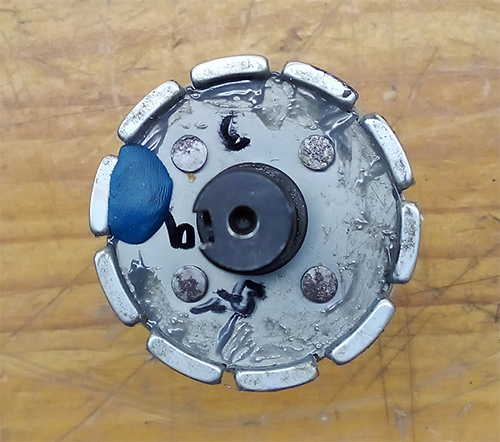
Nótese aquí la disposición axial de las bobinas para una interacción axial de los campos magnéticos del motor. El disco superior es una zapata colectora de los polos consecutivos y el rotor tiene los imanes de neodimio con los polos dispuestos en el disco inferior, donde están pegados según se ve en la figura
El resultado es una interacción de campos en la dirección del eje, porque los campos generados por las bobinas y los campos que presentan los imanes se enfrentan en la superficie del disco inferior, que está soldado al eje.
En este modelo veremos que tiene cierta calidad de ejecución respecto del tipo 3, atendiendo al terminado y ejecución.
Este es un tipo de motor de los utilizados en patinetes de alta potencia y motos scooter eléctricos.
Tienen un alto par desde bajas revoluciones y son motores silenciosos. Este modelo concreto no tiene refrigeración, y su carcasa es cerrada con superficie lisa. Tiene un eje liso de 12mm de diámetro y se instala mediante tornillos M5 en la tapa delantera.
Son varios los distribuidores que lo incluyen en su catálogo.
Para comenzar, retiramos los tornillos de la tapa delantera, y abrimos la máquina para ver su interior.
Antes de comenzar, marcamos las tapas y la carcasa. En este caso con un granete. Precaución con eso, podemos dañar la máquina.
Una vez despegada la tapa de la carcasa, usaremos un extractor de rodamientos para retirarla, pues el rodamiento delantero está alojado esta tapa.
Hemos usado un tornillo de banco como base para que el motor no descanse sobre sus cables. No está sujeto porque el eje no sale de la tapa trasera.
Los tornillos de la tapa atraviesan el motor desde una delante hasta la tapa trasera pasando por unos huecos en el núcleo magnético. Si no hubiésemos marcado las tapas sería muy difícil encontrar la forma de colocar nuevamente los tornillos.
Una vez abierto, vemos el interior, el bobinado, y el rotor con el eje de punta y detalle del chavetero.
Las bobinas, son múltiplo de 3, como es natural. El hilo llena casi por completo las ranuras y cada bobina está formada por varios hilos en paralelo para poder manejar el bobinado en tan pequeño espacio. Todas las ranuras comparten bobinas de distinta fase, sin aislamiento entre ellas, y están cerradas por una tapa de fibra de vidrio.
Se observa que el entrehierro es mínimo, también se ve un exceso de pegamento azul en el rotor, que sirve de contrapeso para evitar vibraciones a alta velocidad.
Por último queda claro que los imanes del rotor han sido pegados directamente al tambor de hierro del rotor, con pegamento específico epoxi.
El hueco restante entre el bobinado y la carcasa hace pensar que el mismo motor puede albergar nucleos y/o bobinado diferente, por ejemplo para motores de 1,5kw y 2kw.
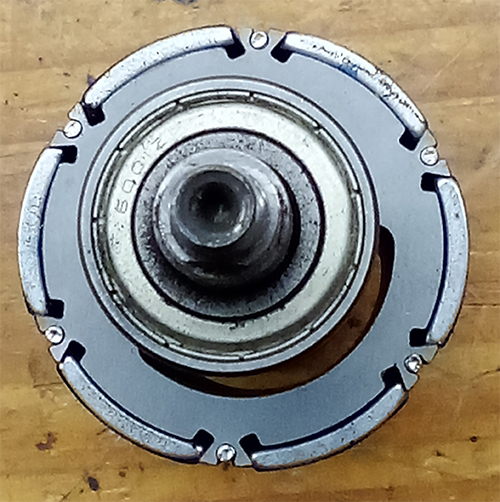
Apenas hay diferencias destacables para esta foto respecto de la anterior, únicamente citar las arandelas alabeadas que comprimen el rodamiento en su alojamiento de las tapas. No debemos olvidar que si falta, el eje puede desplazarse longitudinalmente llegando a dañar los asientos de rodamientos y finalmente perderá el centrado.
Los imanes, en número de 10, están formados por secciones circulares de masas magnéticas de neodimio y su polaridad es norte exterior 5 piezas y sur exterior 5 piezas.
El pegamento epoxi usado para pegarlos al núcleo, es la única forma de unión usada aquí, pues no hay cola de milano, ni ranura de sujeción alguna. Por ello, el pegamento debe asegurar la unión en condiciones de alta velocidad y con cierta temperatura de funcionamiento.
En esta figura se observan varios detalles, como la situación de los sensores hall, que forzosamente deben haber sido instalados después de terminar el bobinado y cerrar las ranuras con su cuña de cierre, pues los hall están alojados justamente en un hueco practicado sobre la ranura para alojar y pegar allí al sensor sin riesgo de que el rotor lo roce.
Vemos que los cables de los sensores se han incorporado a la atadura de las cabezas de las bobinas, aunque lo han hecho después.
Vemos que el material de aislamiento aislamiento es escaso, y se limita al aislamiento de ranura, que no entorpece por sobrar. El aislamiento interfase se confía por entero al propio esmalte del hilo. Esto puede explicarse por la baja tensión de alimentación del motor, aunque no lo justifica por completo en nuestra opinión.
Al igual que en la parte trasera del bobinado, aquí también hay espacio libre entre la carcasa y tapa respecto del bobinado, lo que debería permitir un rebobinado relativamente cómodo.
MOTOR TIPO 3.
Igualmente es un motor BLDC de 48V, con una potencia de 1,8kw según el fabricante.
En este caso el eje de 12 mm de diámetro tiene rosca M6 en la punta para sujetar un piñón para cadena.
Este tipo de motor está indicado en patinetes de alta potencia, y vehículos de movilidad eléctrica personal de bajo coste.
El motor es un modelo de bajo precio, y fabricación china.
Empezamos el análisis de este motor con la retirada de su tuerca, arandela y piñón evitando dañar la rosca o el eje. Hay que tener en cuenta la calidad de la tornillería de los modelos chinos de bajo coste.
En este caso, este modelo ni siquiera tiene un conector específico para los sensores hall, únicamente tiene puestos los espadines en los terminales hall, pero sin carcasa. Esto es algo que no nos preocupa, pues tendemos a unificar este tipo de conectores en uno o dos únicos modelos.
Una vez retiradas las tapas se muestra el interior, que similar al modelo 2 mostrado antes.
Una diferencia es el mayor calibre de hilo, con menor número de espiras seguramente.
Los sensores hall tienen una disposición similar, también carece de esmero en el aislamiento, incluso destaca el uso de bridas de plástico.
Se aprecia claramente el centro de estrella marcado sobre su tubo aislante con un punto y una Y.
El espacio libre restante aquí es menor que en el motor tipo 2.
El rotor visto desde la punta delantera tiene 6 masas polares norte/sur en forma de sector circular pegados al tambor.
No se aprecian elementos de equilibrado del rotor.
El tambor está aligerado y dispone de ranuras de tope para los sectores magnéticos, también tiene unas ranuras de aproximación de los topes cuando en ellas se introduce la varilla separadora. Suponemos este método de sujeción como complemento al uso de pegamento como el modelo de motor anterior.
En las figuras siguientes se ha abierto una controladora de media potencia y calidad media-alta para observar sus componentes internos.
Puede verse que tiene 18 transistores mosfet de potencia en grupos de 3 transistores para formar un puente ondulador trifásico de onda completa PWM.
Las conexiones de potencia se han confiado a barras macizas de cobre soldadas a la placa debido a la alta intensidad de corriente que circula por ellas.
Puede observarse entre las barras colectoras de potencia a tres elementos DIL8 integrados tipo IR2103, que son los drivers excitadores de los mosfet, y un circuito integrado microprocesador marcado en la pista con U6, que gobierna las funciones de la controladora.
El circuito está hecho a doble capa y en la parte visible contiene todos los componentes. La cara oculta contiene las conexiones de potencia y control, entradas y salidas de la controladora.
Los transistores de potencia están aislados del chasis de la caja mediante un aislante eléctrico, y tienen una porción de pasta conductora térmica para conducir y disipar el calor que generan.
En la figura 7 puede apreciarse este detalle con claridad.
En general, esta controladora tiene un diseño cuidado, materiales de calidad de referencia estándar y buena conectividad. Por todo ello puede considerarse como de buena calidad.
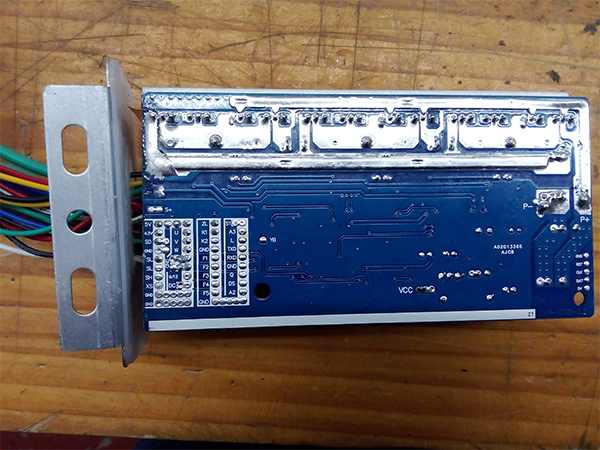
En este caso hemos abierto una controladora de 1000W a 48V, de origen chino.
Esta controladora tiene la funcionalidad básica suficiente para controlar un motor BLDC instalado en un vehículo eléctrico, visualizar en una pequeña consola los parámetros de velocidad, distancia recorrida, estado de carga de la batería y nivel velocidad máxima.
Aunque la idea general de los equipos electrónicos chinos es de baja calidad, aquí se ve que no se corresponde con esta controladora. Si bien la referencia de los componentes tiene denominación asiática, la estructura de construcción del circuito es correcta y cuidada.
La soldadura del cableado es correcta y la soldadura de los componentes es también. Se ha reforzado la sección de las pistas de potencia y los cables tienen también una sección importante teniendo en cuenta la potencia de la controladora.
Si en el modelo anterior tenía 18 transistores para 1500W de potencia total parece razonable que esta tarjeta tiene 12 mosfets para 1000W. Esto no tendría sentido si consideramos que distintos modelos de mosfet pueden tener corriente IDS, pero podemos aproximar que en estos casos los transistores son similares en capacidad de conducción de corriente, para tensiones similares, aunque tengan diferencias en algunos parámetros relativos a su polarización.
Es aceptable en modelos de igual tensión, que una mayor potencia lleva aparejado que la controladora tenga mayor número de transistores.
El modelo actual tiene un precio bien inferior que el anterior, aún para potencia similar.
La aplicación de estos dos modelos de 1000W y 1500W, ambos a 48V está destinada a patinetes de alta potencia, ciclomotores eléctricos, scooter, quad de pequeña potencia, karts de iniciación, etc.
En el mercado existe ya un enorme catálogo de modelos entre los que se puede elegir en base a la calidad, funcionalidad, potencia y precio. Todos ellos necesariamente deben ofrecer la información técnica necesaria para la instalación en condiciones de seguridad y funcionalidad.
En este apartado se muestran unos enlaces a páginas de interés general en electrónica donde se muestran los esquemas de construcción de una tarjeta controladora para motor BLDC.
A continuación se cita un enlace donde se describe el uso de circuitos integrados de origen chino, y amplio uso en tarjetas controladoras de motores BLDC. El precio de estas tarjetas es bajo y pueden servir de base para desarrollar circuitos básicos excitadores de motores, o estudiar su funcionamiento.