TEMA 4
Tipo de motor 2. Potencia 1,5kw. Tensión 48V.
En este modelo veremos que tiene cierta calidad de ejecución respecto del tipo 3, atendiendo al terminado y ejecución.
Este es un tipo de motor de los utilizados en patinetes de alta potencia y motos scooter eléctricos.
Tienen un alto par desde bajas revoluciones y son motores silenciosos. Este modelo concreto no tiene refrigeración, y su carcasa es cerrada con superficie lisa. Tiene un eje liso de 12mm de diámetro y se instala mediante tornillos M5 en la tapa delantera.
Son varios los distribuidores que lo incluyen en su catálogo.
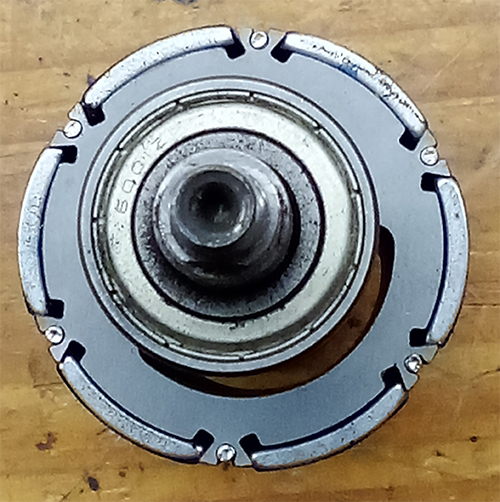
Para comenzar, retiramos los tornillos de la tapa delantera, y abrimos la máquina para ver su interior.
Antes de comenzar, marcamos las tapas y la carcasa. En este caso con un granete. Precaución con eso, podemos dañar la máquina.
Una vez despegada la tapa de la carcasa, usaremos un extractor de rodamientos para retirarla, pues el rodamiento delantero está alojado esta tapa.
Hemos usado un tornillo de banco como base para que el motor no descanse sobre sus cables. No está sujeto porque el eje no sale de la tapa trasera.
Los tornillos de la tapa atraviesan el motor desde una delante hasta la tapa trasera pasando por unos huecos en el núcleo magnético. Si no hubiésemos marcado las tapas sería muy difícil encontrar la forma de colocar nuevamente los tornillos.

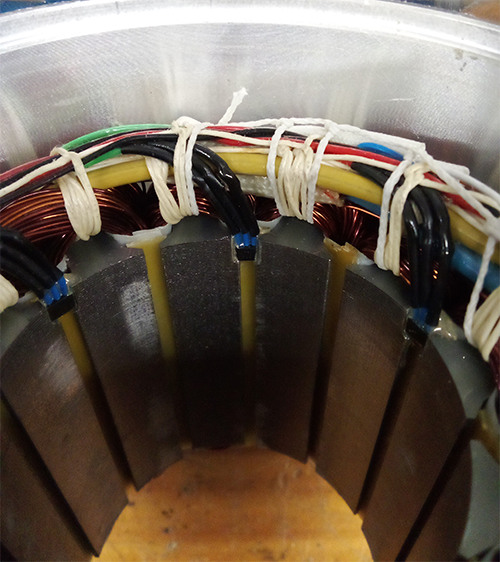
Una vez abierto, vemos el interior, el bobinado, y el rotor con el eje de punta y detalle del chavetero.
Las bobinas, son múltiplo de 3, como es natural. El hilo llena casi por completo las ranuras y cada bobina está formada por varios hilos en paralelo para poder manejar el bobinado en tan pequeño espacio. Todas las ranuras comparten bobinas de distinta fase, sin aislamiento entre ellas, y están cerradas por una tapa de fibra de vidrio.
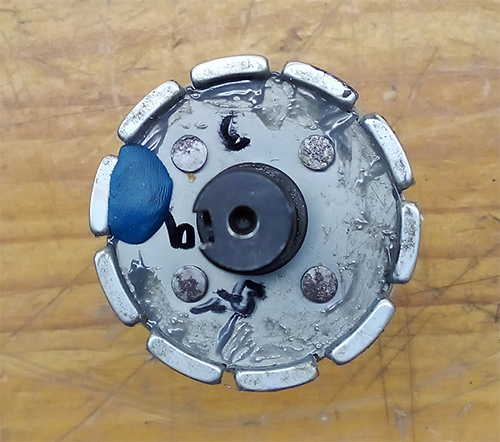
Se observa que el entrehierro es mínimo, también se ve un exceso de pegamento azul en el rotor, que sirve de contrapeso para evitar vibraciones a alta velocidad.
Por último queda claro que los imanes del rotor han sido pegados directamente al tambor de hierro del rotor, con pegamento específico epoxi.
El hueco restante entre el bobinado y la carcasa hace pensar que el mismo motor puede albergar nucleos y/o bobinado diferente, por ejemplo para motores de 1,5kw y 2kw.

Apenas hay diferencias destacables para esta foto respecto de la anterior, únicamente citar las arandelas alabeadas que comprimen el rodamiento en su alojamiento de las tapas. No debemos olvidar que si falta, el eje puede desplazarse longitudinalmente llegando a dañar los asientos de rodamientos y finalmente perderá el centrado.
Los imanes, en número de 10, están formados por secciones circulares de masas magnéticas de neodimio y su polaridad es norte exterior 5 piezas y sur exterior 5 piezas.
El pegamento epoxi usado para pegarlos al núcleo, es la única forma de unión usada aquí, pues no hay cola de milano, ni ranura de sujeción alguna. Por ello, el pegamento debe asegurar la unión en condiciones de alta velocidad y con cierta temperatura de funcionamiento.
En esta figura se observan varios detalles, como la situación de los sensores hall, que forzosamente deben haber sido instalados después de terminar el bobinado y cerrar las ranuras con su cuña de cierre, pues los hall están alojados justamente en un hueco practicado sobre la ranura para alojar y pegar allí al sensor sin riesgo de que el rotor lo roce.
Vemos que los cables de los sensores se han incorporado a la atadura de las cabezas de las bobinas, aunque lo han hecho después.
Vemos que el material de aislamiento aislamiento es escaso, y se limita al aislamiento de ranura, que no entorpece por sobrar. El aislamiento interfase se confía por entero al propio esmalte del hilo. Esto puede explicarse por la baja tensión de alimentación del motor, aunque no lo justifica por completo en nuestra opinión.
Al igual que en la parte trasera del bobinado, aquí también hay espacio libre entre la carcasa y tapa respecto del bobinado, lo que debería permitir un rebobinado relativamente cómodo.
MOTOR TIPO 3.
Igualmente es un motor BLDC de 48V, con una potencia de 1,8kw según el fabricante.
En este caso el eje de 12 mm de diámetro tiene rosca M6 en la punta para sujetar un piñón para cadena.
Este tipo de motor está indicado en patinetes de alta potencia, y vehículos de movilidad eléctrica personal de bajo coste.
El motor es un modelo de bajo precio, y fabricación china.
Empezamos el análisis de este motor con la retirada de su tuerca, arandela y piñón evitando dañar la rosca o el eje. Hay que tener en cuenta la calidad de la tornillería de los modelos chinos de bajo coste.
En este caso, este modelo ni siquiera tiene un conector específico para los sensores hall, únicamente tiene puestos los espadines en los terminales hall, pero sin carcasa. Esto es algo que no nos preocupa, pues tendemos a unificar este tipo de conectores en uno o dos únicos modelos.

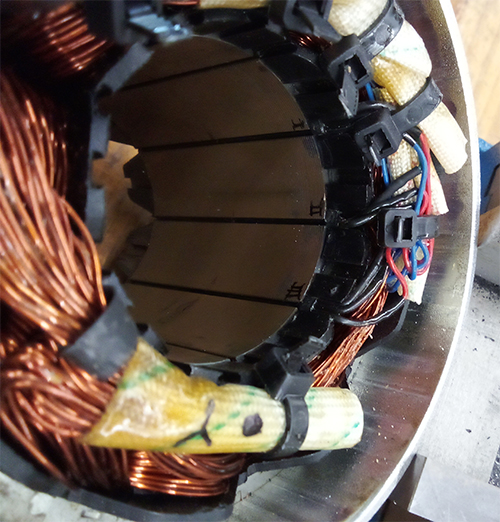
Una vez retiradas las tapas se muestra el interior, que similar al modelo 2 mostrado antes.
Una diferencia es el mayor calibre de hilo, con menor número de espiras seguramente.
Los sensores hall tienen una disposición similar, también carece de esmero en el aislamiento, incluso destaca el uso de bridas de plástico.
Se aprecia claramente el centro de estrella marcado sobre su tubo aislante con un punto y una Y.
El espacio libre restante aquí es menor que en el motor tipo 2.
El rotor visto desde la punta delantera tiene 6 masas polares norte/sur en forma de sector circular pegados al tambor.
No se aprecian elementos de equilibrado del rotor.
El tambor está aligerado y dispone de ranuras de tope para los sectores magnéticos, también tiene unas ranuras de aproximación de los topes cuando en ellas se introduce la varilla separadora. Suponemos este método de sujeción como complemento al uso de pegamento como el modelo de motor anterior.
Rodamiento ref. 6001 Z para eje de 12 mm.